产品详细
当时,敞开型、模块化和集成化已成为数控技术开展的趋势。 为此,世界各国都在抓住研讨制定敞开式高性能渠道的规范及其规范,并进行相关产品的开发,如美国的NGC、OMAC项目、欧洲的OSACA方案及日本的OSEC方案等。 与此一起,世界上各大数控出产厂商也纷繁推出了根据敞开式、模块化和集成化的高性能数控体系。
关于敞开式数控体系的特征一般以为其包含硬件体系的敞开性和软件体系的敞开性,敞开的硬件体系由微型机及模块化的速度操控单元、方位操控单元和内置的PC构成;敞开的软件体系是指数控软件体系的规划模块化及模块间的接口规范化。 现在,敞开式数控体系有;种完结途径: 一是PC机f数控专用模板;二是PC机+可编程运动操控器;三是纯PC机型。
这种根据敞开式可编程运动操控器的体系结构以通用微机为渠道,以PC机规范插件办法的敞开式可编程运动操控器为中心。 通用PC机担任如数控程序修改、人机界面办理等功用,运动操控器担任机床的运动操控和逻辑操控。 这种运动操控器以运动子程序的办法解说履行数控程序,以PC子程序办法完结机床逻辑操控,支撑用户的开发和扩展,具有上、下两级的敞开性。 美国Delta Tau公司的PMAC是这种运动操控器的典型代表,其具有本身的CPU,一起敞开包含通讯端口、存储结构在内的大部分地址空间,具有灵敏性好、功用安稳、可同享计算机一切资源等特色。 尽管国内外许多学者在根据PMAC运动操控器的敞开式数控体系方面作了很多的研讨工作,但都还处于研讨阶段,用于出产或产品化还根本没有完结。
(1)支撑各种高档言语,用户能够运用:VB、VC、Delphi等在Windows件渠道上定制用户专用界面。
(2)在数控言语上对用户敞开,不只支撑用户直接调用现有的直线、圆弧、样条曲线的插补指令!而且还答运用户自定义G代码、M代码、D代码、S代码,完结以往数控言语所不能完结的功用。
(3)供给内装式软件化的PLC,能够编制64个异步PC程序,经过一些指针变量,用户能够按位按字节进行逻辑操控。
(4)可同享PC微机丰厚的各类支撑软件和工具软件,方便地与各类网络衔接,与(2a(&体系衔接,便于长途确诊、网络制作和制作体系集成操控的完结。
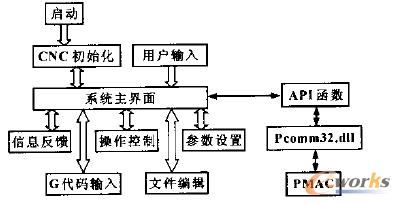
经过CNC体系运用程序编程接口,开发CNC体系的用户界面能够选用各种能够调用Windows动态链接库的编程言语,如VB、VC、Delphi等,别离编制不同使命的前端用户界面程序,具有很大的灵敏性和敞开性。 软件开发人员经过CNC体系运用程序接口的一致支撑,能够方便地结构CNC体系的运用软件!即结构前端用户操作界面。 Delta Tau公司供给了Pcimm32运用程序通讯驱动器,它包含了同PMAC通讯的各种办法,而且将其首要函数进行分类、封装,构成一种可根据用户需求而调用的动态链接库。经过这些函数能够完结PMAC与PC机之间的通讯功用,用户不必直接对端口进行操作就能够完结对PMAC硬件的操作,而且程序规划灵敏、敏捷及可移植性好。 如OpenPmacDeve()函数用于与某一个PMAC设备树立通讯联系;PmacGetResponse()函数用于给PMAC发送指令并回来履行成果,等等。 体系软件结构如图1所示。
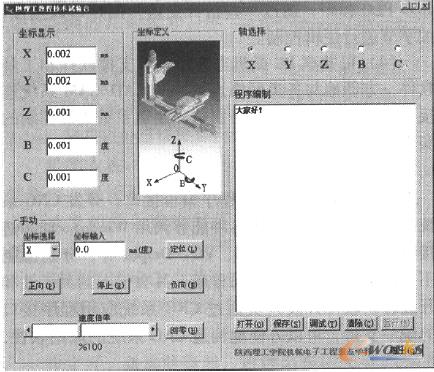
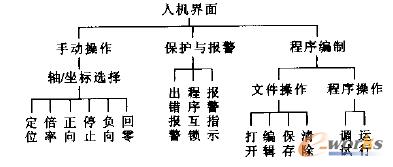
在硬件体系方面,规划了一套根据PMAC运动操控器的五轴数控体系实验渠道,其间;个移动别离由步进电机直接驱动,光栅尺和编码器反应,两个滚动别离由步进电机经蜗轮蜗杆副减速传动,编码器反应。 运动操控器选用PMAC-PC104八轴卡,上位机选用工控机(IPC),选用RS232串口通讯。 数控体系软件是在Windows 2000操作体系下,以Vsual Basic6.0为开发工具,选用面向对象的编程办法,充分使用PMAC的动态链接库中的函数,完结了数控体系的根本功用。 体系软件主界面如图2所示,其功用树如图3所示。 详细完结的功用包含 人机接口界面体系初始化、坐标轴挑选、手动操控、坐标方位实时显现、速度操控及G代码的修改、下载等。
体系的初始化在体系软件运转过程中完结,首要进行PMAC的挑选和参数预置等功用。 初始化代码如下。
手动操控有轴挑选、各轴的点动进给、准确定位、回零点和电机速度操控等功用。 轴挑选经过一组单选按钮OptionButton控件完结,运用Case句子触发各挑选,确保每次只能挑选一个轴,一起在手动操控框下也能够挑选,使用ListBox实
现,二者是同步的,完结相同功用。 准确定位是经过在坐标输入文本框中输入坐标值,操控各轴电机运动的间隔为给定坐标值,一起使用反应来比较,确保定位的精度。 速度操控是经过改动PMAC的I变量来完结的。 一切手动功用都是经过API函数PmacGetResponeA来完结,经过改动string给PMAC发送不同的指令。 其间轴挑选的string为“#n”,点动的string为“#j+”或“#j-”,准确定位的string为“#nm172->
L”两条句子来完结。
这儿使用了提timer定时器控件,体系的状况以及各种参数变量都存储在PMAC内存中,别离用M变量去指向各状况的地址,可经过操作M变量进行状况的读取和参数的写入以及完结I/O口的操控。
G代码便是数控体系的运动程序,实践上也是坐标轴的运动操控程序,也便是加工程序。 PMAC的运动程序言语有它自己的特色,选用类似于BASIC的高档言语编程,以调用子程序的办法支撑加工程序的G代码编程。
PMAC的运动程序能够经过它的G]FK$,终端窗口编写,程序送到缓冲区后,能够在终端窗口键入“&mBnR”运转程序,其间m为坐标系号,n为程序号;如果是在文本修改器中编写的程序,有必要将其下载到PMAC中,然后才干运转。 因为PMAC内存有限,几百K以上的大程序不能一次下载运转,这就要用到循环运动程序缓冲区。 循环运动程序缓冲区答应在程序履行期间对程序进行下载,并掩盖现已履行的程序行,这就能够接连履行比PMAC的存储空间大的程序,而且实时下载程序行。
数控程序中的G代码和M、T、D等功用指令由G代码解说程序、M代码解说程序、T代码解说程序和2代码解说程序别离进行解说。 这4个解说程序别离以运动程序PROG1000、PROG1001、PROG1002和PROG1003的办法存在,在体系调试时由PMAC可履行程序将它们下载到PMAC的固定内存中,在实践加工中被PMAC主动调用。 主界面中的“调试”按钮即用于完结这一功用,并在调试过程中发现过错后告诉编程者,其程序代码为:
PMAC将G、M、T、D代码作为子程序来调用!在解说程序中,能够针对特定的机床定制代码。 在运动程序中遇到G代码时,将会调用解说程序PROG1000,跳转到解说代码行,如G17将跳转到PROG1000的N17000行。
PMAC内置有PLC操控和编程功用,它是以循环逻辑次序来履行命令,但它的编程办法不是梯形图编程,而是选用类似于BASIC等高档言语的编程办法!不需求专用编程器,履行速度更快。
PMAC的内置PLC与NC共用CPU,使用CPU的余力来发挥PLC的功用,所以I/O点数较少。 经过PC程序能够彻底地对PMAC变量和I/O进行操作,而且它具有非同步的特性,因而它能有力地帮忙运动操控程序完结使命。
敞开式数控体系(ONC)是现在数控开展的趋势,而PC机+可编程运动操控器型敞开式数控体系是开展的干流。 笔者开发的根据PMAC的五轴数控体系实验渠道,结构简略,数控体系软件运转杰出,用户可根据自己的需求进一步开发,真实完结了数控体系的敞开性,达到了敞开式数控体系的要求。